MOTION TRACKING WITHOUT BOUNDARIES
Go Places With ROMOS™ Inertial Navigation System!
ROMOS is a patented technology that delivers sustainable accurate location data in the absence of GPS/GNSS.
ROMOS is a patented technology that delivers sustainable accurate location data in the absence of GPS/GNSS.
ROMOS emits drift-free orientation and position data in millimeters to a host device or processor. Unlike conventional Inertial Measurement Units (IMUs), additional external reference signal(s) are not required to compensate for drift error. Position data is generated at a high rate through internal MEMS based inertial sensors for direct use in the host application. ROMOS comes feature-packed out-of-the box with communications and electrical compatibility with conventional IMUs minimizing design-time for Engineers.
Orientation is established via complex computations in multidimensional vector-space and projected onto 3D Euclidean space.
Using higher dimensional computations with back-propagation, Drift is also eliminated from positional data.
Once initialized, ROMOS will experience a maximum of 0.5mm static variance offset from true position data over its operational lifetime.
ROMOS employs fast-mode SPI, I2C, or UART signals for immediate communication compatibility with existing boards and architecture.
ROMOS is designed with minimal real-estate per package type with a range of compact form factors to suit all applications.
ROMOS is designed with modularity in mind. Protocols and IOs can be customized to meet new specifications for fast design-to-production time.
Long-term sustained location tracking enabled by ROMOS, in the absence of GPS or other external reference systems, unveils new dimensions and solutions for a wide range of applications.
ROMOS opens the possibility of circumnavigating the globe without GPS, creating the World's first Terrestrial Positioning System (TPS).
Automobiles gain low-latency and high-accuracy positioning with ROMOS for autonomous-vehicle perception systems.
Robotics applications requiring precise movements, especially in GPS denied zones, can operate with ROMOS freely.

Consumers benefit by moving freely through their surroundings with accurate location tracking for apps such as augmented and virtual reality.

ROMOS provisions a low-cost redundant position-estimation module for transponders on Airplanes, Drones, or UAVs.
Satellites requiring precise orbital tracking can greatly enhance position estimates improving ground and aerial services.

With ROMOS, be informed of your dependents' exact whereabouts for safety and peace-of-mind.

Enhance personnel safety and rescue by accurately tracking 3D movements of first-responders within buildings and elevations where GPS is denied.
This video demonstrates the tracking accuracy of ROMOS IMU without a GPS signal while walking in an office building. ROMOS signal (Red) is received on a PC running a Unity Application and superimposed on a one-to-one scale 3D model of the space, live. Absolutely no pre-mapping of the indoor space was performed.
ROMOS is a self-tracking (inside-out) IMU that does not require an external signal to track an object's movements.
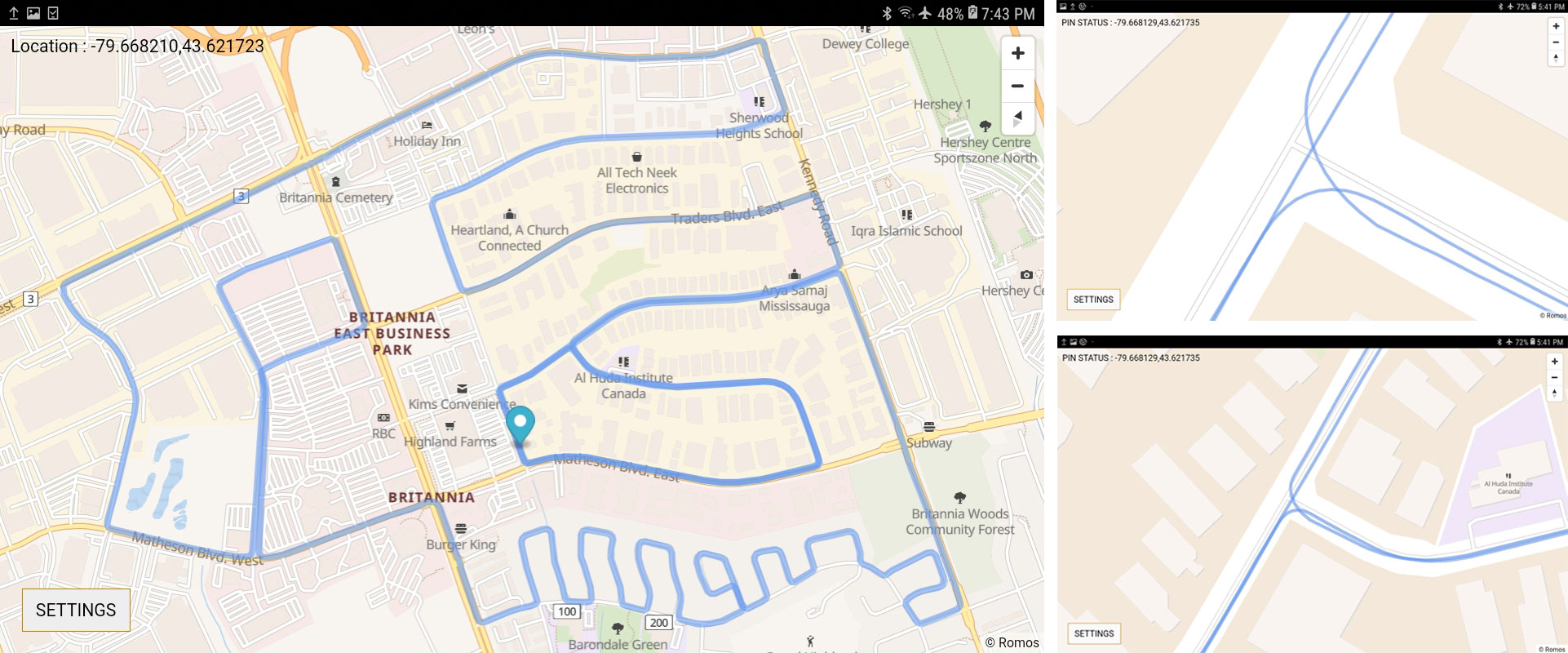
This video demonstrates the tracking accuracy of a ROMOS (top-right in video) IMU, in the absence of a GPS signal, while driving through a tunnel. In comparison, a Google Maps App (bottom-right in video) relying on a GPS signal and conventional IMU stops tracking and freezes when entering the tunnel.
Blue lines illustrate the path of a vehicle as detected by ROMOS and plotted on an offline map. No GPS or internet signal was used during this 40 km trek through the City of Mississauga in Canada. ROMOS is capable of detecting lane-level changes in the movement of a vehicle, placing high-accuracy autonomous driving within a short reach of the future.